What you’ll learn:
- 为什么以及如何制造柔性执行器。
- How they were used in an aerial micro-robot.
- The performance obtained with these actuators.
尽管各种尺寸的无人机和空中机器人的电子设备继续以令人印象深刻的速度缩小,但对于微型演奏者而言,实现同样的速度是一个挑战,因为物理和机械功能的定律特别反对这些尝试。不过,这并没有阻止创新研究人员构想和执行新方法或扩展较旧的方法。
As evidence of this ongoing effort, MIT researchers have demonstrated tiny drones with soft, very durable actuator muscles. Existing dielectric elastomer actuators (DEAs) require higher driving voltages, and their power density and lifetime remain substantially lower as compared to existing piezoelectric bimorphs and electromagnetic motors. However, the new MIT design can operate with a voltage that’s 75% lower than those versions while carrying 80% more payload.
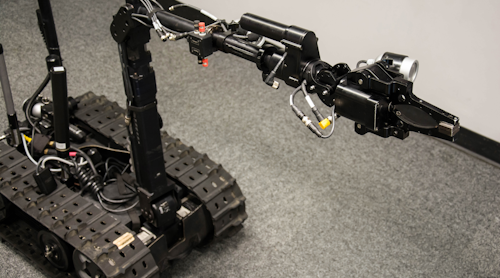
The rectangular micro-robot has four sets of wings comprised of two joined pairs. Each wing is driven by a soft actuator that’s like an artificial muscle, which rapidly flaps the robot’s wings(Figs. 1 and 2). These muscle-like actuators consist of layers of elastomer that are sandwiched between two very thin electrodes and then rolled into a squishy cylinder. When voltage is applied to the actuator, the electrodes squeeze the elastomer, and that mechanical strain is used to flap the wing.
1. The pieces of the aerial micro-robot before assembly; note the two flexible actuators which are also the wings.
2.四模组机器人的装配:(a)一个flapping-wing robot module. (b) Four carbon-fiber connection bars are attached to the robot airframe. (c) A second robot module is attached to the connection bars, creating a two-module robot. (d) Two two-module robots are attached using three carbon-fiber connection bars.
The more surface area the actuator has, the less voltage is required. To achieve that goal, the team built the artificial muscles by alternating between as many ultra-thin layers of elastomer and electrode as possible. However, as the elastomer layers get thinner, they become more mechanically unstable.
When operated at 400 Hz, the 143-milligram DEA generates a force of 0.36 newtons and displacement of 1.15 mm. This DEA is incorporated into an aerial robot to demonstrate the resultant high performance.
The robot achieves a high lift-to-weight ratio of 3.7, low hovering voltage of 500 V, and a long lifetime exceeding 2 million actuation cycles. This isn’t random lift or flight, as the robot demonstrated the longest and best-performing flight among existing sub-gram aerial robots, with 20 seconds of hovering time, and position and attitude error smaller than 2.5 cm and 2 degrees.
“People tend to think that soft robots are not as capable as rigid robots.” said project leader Prof. Kevin Chen, in the Department of Electrical Engineering and Computer Science, the head of the Soft and Micro Robotics Laboratory in the Research Laboratory of Electronics (RLE). “We demonstrate that this robot, weighing less than a gram, flies for the longest time with the smallest error during a hovering flight. The take-home message is that soft robots can exceed the performance of rigid robots.”
Meeting the Fabrication Challenge
A flex-wing concept isn’t enough; it must be built and tested. The researchers were able to create an actuator with 20 layers, each of which is 10 µm in thickness(Fig. 3)- 首次成就。为此,他们不得不重塑制造过程的一部分。
3. Illustrations of DEA assembly: (a) Depiction of the elastomer-electrode multi-layer. The patterns of odd and even numbered CNT electrodes are offset. (b) Outline of the DEA release cut. (c) The DEA’s top and bottom edges correspond to the two exposed electrodes. (d) The DEA is rolled into a cylindrical shell. (e) The two ends of the DEA are exposed for making electrical connections. (f) Conductive epoxy and carbon-fiber endcaps are applied on each end to make electrical connections.
例如,在旋转涂布,弹性体poured onto a flat surface and rapidly rotated, and the centrifugal force pulls the film outward to make it thinner. “In this process, air comes back into the elastomer and creates a lot of microscopic air bubbles. The diameter of these air bubbles is barely 1 micrometer, so previously we just sort of ignored them,” explained Chen. “But when you get thinner and thinner layers, the effect of the air bubbles becomes stronger and stronger. That is traditionally why people haven’t been able to make these very thin layers.”
The researchers found that if they perform a vacuuming process immediately after spin coating, while the elastomer was still wet, it removes the air bubbles. Then they bake the elastomer to dry it. Removing these defects increases the power output of the actuator by more than 300% and significantly improves its lifespan, said Chen.
研究人员还需要优化由碳纳米管(CNT)组成的薄电极。面临的挑战是,较高的CNT浓度会增加执行器的功率输出并降低电压,但密集的层也包含更多的缺陷。碳纳米管具有锋利的末端,可以刺穿弹性体,从而导致设备短路。经过大量反复试验,研究人员发现了最佳浓度。
A third problem comes from the curing stage. As more layers are added, the actuator takes longer and longer to dry. “The first time I asked my student to make a multilayer actuator, once he got to 12 layers, he had to wait two days for it to cure,” said Chen. “That is totally not sustainable, especially if you want to scale up to more layers.”
They found that baking each layer for a few minutes immediately after the CNTs are transferred to the elastomer cuts down the curing time as more layers are added.
Modeling, Test, Evaluation
这个麻省理工学院组在空中微型机器人方面具有丰富的经验,因此他们从非常基本的电气模型开始(Fig. 4)and then extended it to far more complex versions. They evaluated the performance across various parameter pairings including (but not limited to) basic force measurements(Fig. 5).
4. DEA电气模型:(a)具有建模参数的DEA电路模型。vINis the input voltage, and VDis the voltage drop across the capacitance. RDand CDare the resistance and the capacitance of the DEA, respectively. Resistance values of the DEAs made of the filters with different CNT concentrations also are presented. (b) Estimation of the voltage drop on the capacitance along varying resistance when an ac input with 400 Hz is applied to the 6-, 8-, 10-, 12-, 16-, and 20-layer DEAs. Markers represent the estimated VD/VIN不同CNT浓度的20层DEAS的比率。
5. Shown is the DEA blocked-force measurement. The blue curve shows the sensor measurement when the DEA is driven by a 400-Hz sinusoidal voltage input; the orange curve shows the fitted line. As indicated by the black arrows, the blocked force is calculated as the zero to peak value.
这项工作在发表的论文中详细介绍Advanced Materials, “High Lift Micro-Aerial-Robot Powered by Low Voltage and Long Endurance Dielectric Elastomer Actuators。”此外,他们的25页“Supporting Information” posting contains detailed models; in-depth aerodynamic, electrical, and mechanical analyses; and a full suite of test results. Given the nature of the project, it’s not surprising that there are also several short videos are available, as well as this interesting two-minute overview video for the general public: