你将学习:
- 功能安全的系统和电子设备如何帮助减少交通事故。
- 在设计功能安全系统时应该考虑什么。
- 创建失败操作架构。
功能性安全系统是实现“零愿景”的关键,尤其是随着越来越多的自动驾驶汽车(AVs)进入市场和道路。“零愿景”是一项旨在将道路交通死亡或严重伤害降至零的多国道路交通安全项目。目前,美国每年有超过4万人死于交通事故。
在自动驾驶汽车中部署功能性安全系统将使这项技术得到更广泛的应用,从而使所有人的道路更安全。这些新的功能安全要求是安全系统的演变,可以追溯到后视镜、前灯、安全带、安全玻璃、头枕和安全气囊。因此,从历史上看,在汽车应用中实现安全性是一个持续的过程,现在它正被提升到一个新的水平。
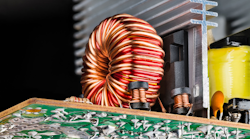
在这些系统中建立信任对于广泛采用自主技术至关重要。这需要始终可用的可靠系统,包括可靠的传感器、计算、驱动器、内存和电源(图1).
功能安全标准,如ISO 26262,确保这些系统在发生故障时以安全的方式运行。用户需要信任这项技术,因为它在功能安全方面做得更好。这是实现愿景零的关键。
功能安全
功能安全性由三个部分组成。当某样东西是故障安全的,它可能会失败,但这种失败不会造成伤害。失败操作是指在发生故障的情况下,系统在有限的时间内仍有一些功能。高可用性意味着,在发生故障的情况下,汽车系统有足够的能力使汽车仍然可以运行很长一段时间。
作为一个整体,功能安全是关于系统在发生故障时如何反应。这需要适用于所有级别的汽车,从经济型到豪华型,以帮助建立用户对自动驾驶技术的信任。
对于所有级别的自动化,尤其是4-5级,司机/乘客需要相信技术和系统能够工作。现在,使用不太可靠的半导体的系统是否真的需要与驱动程序建立信任关系?不,但这正是可靠的电子设备通过建立故障安全协议变得重要的地方。我们需要相信技术能够发挥作用,就像我们相信汽车的刹车能够发挥作用一样。
对于每个安全目标,检测相关故障并定义一个安全状态(如果发生相关故障或可以检测到相关故障,系统应该做什么),为减轻后果建立一个协议。这为乘客/司机提供了保证,如果发生故障,计划是到位的,计划是备份系统。
系统操作失败
由于建立了这种失败操作架构的需求,我们还必须考虑它可能是什么样子的。为了给自动驾驶汽车中的这些失灵操作系统增压,我们可以用航空作为一个模型。故障操作电动助力转向系统(EPS)的一个常见概念是,与故障安全系统不同,它拥有两种功能。它提供了冗余,以便在失败时弥补缺口。
例如,我们可以利用连接二次逆变器、传感器、电源等的两个独立的单板,而不是在一个单板上有两个mcu以保证故障操作安全。因此,如果整个董事会失败,系统可以恢复到备用系统,避免灾难性的结果(图2).
虽然这可能会增加成本,但在某些应用程序中,冗余的好处可能超过潜在的缺点。所有与安全相关的故障模式都需要经过诊断检查,以确定是否应该采取措施以进入安全状态。,禁用故障通道。次要通道提供部分辅助。冗余系统可以包括MCU、逆变器、传感器、双绕组电机、电源和电源。
建立功能安全的系统,以避免严重的事故,并接近实现愿景零将依赖于可靠的半导体元件。在车辆设计中采用了故障操作架构和冗余,用户可以更放心地相信自动驾驶技术,从而为更广泛的采用奠定了基础。