你将学习:
- 雷达波形
- FMCW雷达的组成
- 雷达范围内处理
- 距离分辨率的计算
- 利用FMCW啁啾进行速度计算
- FMCW啁啾的设计
随着自动驾驶越来越受欢迎,顶级原始设备制造商也投入了大量资金用于研发,雷达在汽车行业的重要性急剧上升。例如,它被用于高级驾驶员辅助系统(ADAS),具有盲点监控、停车辅助、避碰等功能。
频率调制连续波(FMCW)已成为汽车雷达应用的首选格式。本文讨论了汽车雷达FMCW的啁啾结构。
随着77-GHz雷达管理机构的标准就位,其应用已经扩展到多个行业。让我们来看看涉及到汽车雷达的一些基本概念。
雷达的基本知识
汽车雷达大致分为24 ghz和77 ghz频段。前者的频段非常窄,仅为24 ~ 24.5 GHz,使得雷达难以在汽车ADAS中使用。这就是为什么应用程序已经转移到77-GHz频段——它的带宽扫描频率为4 GHz(高达81 GHz)。
在汽车工业中使用雷达的主要目的是为了方便汽车的目标检测。它可以用于ADAS或与成像传感器一起完全自主。雷达帮助识别距离、速度和仰角。
雷达使用多种波形进行探测。然而,汽车系统主要使用FMCW。
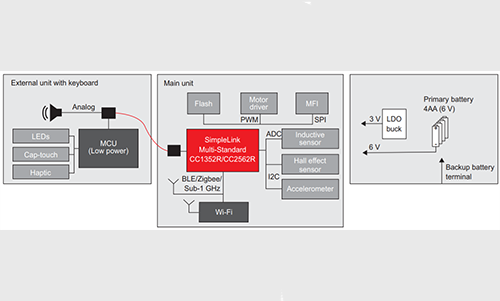
FMCW雷达组件包括:
- 发射和接收天线
- 放大器(低噪声放大器)
- ADC(模数转换器)
- 低通滤波器
- 单片机
使用FMCW啁啾进行距离处理
FMCW啁啾由一段时间内频率线性增加的电磁波组成。这些信号被物体发射和反射,然后被接收。一般情况下,FMCW传输的啁啾可以表示为:
x(t) = Ac * cos(wc + Ab * t) * t (1)
其中“wc”表示载波频率,“Ab * t”表示频率随时间的渐变,“Ab”表示该渐变的斜率。
从物体反射过来的接收信号将是输入信号的时移版本。接收信号表示为:
x (t−Tp) = Ac * cos (Ab (wc + * (t−Tp)) * (t−Tp)) (2)
因为Tp是输入信号与接收信号之间的时间差,可以推断出物体越远,Tp的值越大。因此,可以通过测量发射和接收啁啾之间的频率差来确定距离。将这些信号通过具有适当截止频率的混频器,就可以产生一个中频信号,其频率是发射信号和接收信号之间的拍频。拍频计算如下:
b = (Ab/(2 * pi) * Tp) (3)
这种关系表明,目标的往返时间与拍频成正比。因此,方程可以进一步简化为:
fb = ((Δf/Tb) * 2R/c) (4)
通过中频,我们可以观察到通过对信号进行傅里叶变换,我们可以计算fb。从上面的方程,我们可以进一步计算出物体的距离,因为斜坡的斜率和光速都是已知的参数。
在多个物体的情况下,根据物体的距离,我们接收到不同的中间频率。执行傅里叶变换时,我们在不同的箱子中观察到多个峰值,它们对应于不同的距离。
距离分辨率
如前一节所讨论的,FMCW啁啾上的距离处理可以通过处理接收到的啁啾来检测多个对象。然而,啁啾之间的最小距离有一个限制,以便处理能够区分这些物体,这被称为距离分辨率。
由于拍频是通过快速傅里叶变换(FFT)计算出来的,因此分辨力的限制来自于两个中频音调为1/T Hz时可以分离频率,其中T为FFT的观察窗口。因此,决议标准确定为:
Δfb≥1 /结核病
将式4中给出的值代入,可以得到:
Δfb = (Δf/Tb) * 2ΔR/c
简化后,我们观察到:
ΔR = c/(2 * Δf)
因此,我们可以得出结论,在FMCW啁啾配置中,距离分辨率与带宽成反比。通过观察这些公式,我们现在可以理解带宽和啁啾时间之间有趣的相互作用,以及它对最大距离和距离分辨率的影响。一个人必须仔细考虑所有这些参数,而设计一个有效的啁啾配置,以满足现实世界的限制。
利用FMCW啁啾设计计算速度
在一般情况下,FMCW设计中的整个帧包含多个啁啾,可以用来计算物体的速度。但是用运动物体的多普勒频移来计算速度呢?
如果一个移动的物体在整个啁啾中被检测到,那么接收到的信号将会被多普勒频率移动,也就是说,接收到的信号在整个啁啾之间有一个恒定的相移。因此,物体的FFT范围将在相同的频率bin中有峰值,但有一个相移-一个在对应vTc运动的整个啁啾中是恒定的,其中“v”是速度,“Tc”是啁啾时间。
这种相移可以通过对对应对象的对应范围FFT bin的啁啾进行FFT来计算。因此,我们可以通过执行二维FFT来总结整个帧的操作—范围和速度计算,一个是每个啁啾的样本数量,另一个是啁啾的FFT。通过测量多普勒FFT箱中的峰值,我们可以通过以下公式快速将箱值映射到速度:
V= λ * ω/(4π * Tc)
然而,在设计FMCW啁啾时必须考虑一个注意事项。在上面的方法中,假设对象,虽然有一个速度,但没有足够的移动来呈现在多个啁啾的不同范围框中。也就是说,对象的移动被限制在整个帧的范围分辨率上。
因此,FMCW啁啾为我们提供了一种计算多目标距离和速度的简便方法。
最大速度和速度分辨率
由于速度是通过测量相位差来计算的,因此最大速度是通过确保计算的相位不模糊来限制的。歧义由以下条件维持:
ΔΦ<π
例如:
v < λ/(4 * Tc) (5)
其中Tc为啁啾时间。
类似于在距离处理场景中观察到的分辨率标准,在相同距离下运动物体的两个速度之间的最大分辨率是由FFT计算的两个频率必须相隔一个频率箱这一事实决定的。因此:
Δω> 2π/ N
其中N表示根据配置的啁啾个数。
将式5代入,可简化为:
Vr = λ/(2 * Tf)
其中Tf为帧时间,计算为N*Tc。
FMCW啁啾的设计
考虑到上述参数的所有影响,我们现在必须设计啁啾配置来满足所有给定的要求。根据用例,已知的参数是最大距离、距离分辨率、最大速度和速度分辨率。
总啁啾时间包括空闲时间;一般来说,是一个斜坡时间。斜坡时间可以进一步划分为ADC开始时间、有效时间和斜坡超时时间。有效带宽是只在T有效期间上升的频率带宽。
有效带宽计算
第一个设计参数是带宽,它可以通过与距离分辨率的关系直接计算出来。我们知道:
△r = c /(2 * b)
因此,带宽可以很容易地计算出来。
斜坡时间计算
根据FMCW结构中频和范围之间的关系,可以计算出斜坡时间的值。已知硬件厂商支持的最大中频,有:
如果马克斯= (2 * r马克斯B / C) *eff/ Teff
因此,斜坡时间为:
Teff= (2 * r马克斯* Beff) / (C *马克斯)
另外,假设ADC开始时间和斜坡剩余时间为常数,我们可以计算斜坡时间。因此,我们可以找到跨越斜坡时间的扩展带宽,因为斜坡保持恒定。那就是:
Beff/ Teff= B前女友/ T斜坡
既然可以计算扩展带宽,空闲时间就显示为扩展带宽的函数。
此时,我们已经计算出满足要求的总啁啾时间。然而,由于所有这些参数的相互作用,有可能我们的系统设计效率低下。因此,我们提出了一种检查机制,将根据设计的啁啾时间计算的最大速度与给定的最大速度进行比较。如果最大速度大于期望值,那么我们就高估了啁啾时间。
为了设计一个更有效的啁啾结构,我们着手减少啁啾时间。因此,应利用最大速度方程给出的啁啾时间来重新计算距离分辨率和最大距离。
T ' =λ/ 4 * Vres)
空闲时间的值保持不变,因此新的T斜坡是由:
T '斜坡= t ' - t闲置
和
T 'eff= T '斜坡−Tadc−Tramp-ex
使用这些新值,我们现在回去计算B的值前女友、距离分辨率和最大距离。使用这些值,我们观察到距离分辨率的降低和最大距离的增加,因此仍然满足设计的要求。
现在我们可以计算出满足速度分辨率所需的最小啁啾数:
N= λ/(2 *△v*T ')
由于速度是通过对啁啾数执行FFT来计算的,所以我们必须将啁啾数的值四舍五入到2的数量级n.



_and_Applications.png?auto=format&fit=crop&h=139&w=250&q=60)







.png?auto=format&fit=crop&h=139&w=250&q=60)