在他的主题演讲Computex.那nvidia.首席执行官Jensen Huang宣布该公司的ISAAC倡议(图。1),这是为了将机器人模拟带到一个下一个级别。机器人模拟可以是非常有价值的,允许在不需要硬件或物理环境运行培训的情况下进行测试。
机器人的进步到处都是从靠近人间的Cobots发生的(看 ”撞到cobots.“)到自驾车。这些系统的一个方面是人工智能(AI)和机器学习(ML)的增加。今天,最受欢迎的ML技术基于深度神经网络(DNN)(看 ”机器学习技术有什么区别?“)。DNN需要培训,机器人模拟可以提供帮助。
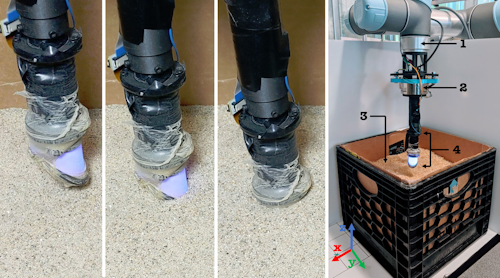
1. NVIDIA的ISAAC倡议是一个机器人仿真系统,内置于增强版的史诗般的游戏'虚幻引擎4.这个演示有一个机器人玩曲棍球。
机器人仿真软件已经存在了很长一段时间,目前有许多平台可用。调用一个流行的开源平台凉亭。它可以利用多种高性能物理发动机,包括颂那子弹那傻瓜, 和镖。它使用了orge.开源图形渲染引擎。
ISAAC正在建立在增强版本的版本上史诗般的游戏'虚幻发动机4和Physx物理引擎。它的设计预计将提供高性能,高保真仿真环境,需要比游戏更准确的模拟。例如,碰撞及其响应必须比游戏所需的响应更准确。
NVIDIA还希望提高创建原型和仿真环境所需的时间和精力。其Jetson机器人参考平台提供了快速轻松地创建原型的构建块。该平台基于NVIDIA Jetson TX2的自定义软件堆栈(看 ”探索Jetson TX2“)。最重要的是,Nvidia合作伙伴正在释放从潜水员到无人机的一切的开源平台。
2.ISAAC可以使用不同的细节运行多个模拟,以便可以进行ML强化学习。
现实世界中的加强学习可能是耗时的。如果有足够的计算电源,ISAAC将允许多个模拟同时运行(图2)。系统将与之界面Openai健身房。健身房是开发和比较强化学习算法的开源工具包。还有一个用于开发人员的健身房的培训工具图书馆。
ISAAC是一项正在进行的工作,我们只是在进程开始时看到了。与虚拟现实和增强现实硬件集成在未来的作品中。这将允许开发人员了解机器人将如何在虚拟或混合现实世界中与现实世界互动。