影响各种尺寸的无绳机器人运行时间的众多因素之一是它们的功率/重量比。将电池放置在不同位置的标准做法限制了电池的允许体积,这使得这种困境更加严重。
相反,对大多数生物来说,动力是分布并储存在全身的(想想肌肉);宏观生物系统没有一个与分立电池类似的独特器官。用适形、多功能的生物形态电池取代机器人设备中的传统独立电池,原则上可以在减轻重量的同时延长电池的运行时间。
现在,密歇根大学(Ann Arbor)的一个研究小组正在开发微型电池,他们使用基于芳纶纳米纤维的复合材料,这种复合材料具有类似软骨的纳米结构,结合了机械和离子传输(电池)特性。由这些复合材料制成的离子导电膜使柔韧、柔韧的锌空气电池成为可能,它还可以作为保护外壳,并支持机器人的成员,包括柔软、柔韧的小型化版本。
该项目开始于使用锌空气电池技术的电池材料、化学和充放电循环。领导这项研究的Joseph B. and Florence V. Cejka工程教授Nicholas Kotov承认,“就能量密度而言,没有其他报告的结构电池可以与当今最先进的锂电池相媲美。”
锌空气电池的另一个缺点是,它们能保持100次左右的高容量,而不是我们所期望的智能手机中的锂离子电池500次或更多。造成这种情况的主要原因是,锌金属会形成刺钉,最终穿透电极之间的膜。
锌的一面
那么为什么要用锌呢?电极之间坚固而柔韧的芳纶纳米纤维基体是锌电池相对较长的循环寿命的关键,而廉价和可回收的材料使电池比锂电池更容易更换。采用锌-空气的方法,离子导电膜基于芳纶纳米纤维复合材料(与凯夫拉尔背心中发现的碳纤维相同)和水基聚合物凝胶,使柔韧电池的开发成为可能,然后可以用于机器人设备的表面。
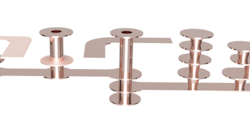
此外,凝胶和芳纶纳米纤维在电池损坏时不会着火,这与锂离子电池中的可燃电解质不同。电池材料丰富,大部分是无毒材料,比目前使用的电池更环保。这种新型电池的工作原理是通过电解膜在锌电极和空气侧之间传递氢氧根离子。这种膜部分是由芳纶纳米纤维和凝胶组成的网络,它有助于在电极之间运输氢氧根离子(图1).
该团队的大部分初始工作涉及对不同膜密度和孔隙度的调查,以优化电池性能,同时提供极大的灵活性(图2).
进入机器人
该项目的另一个主要部分是将这些电池与机器人本身的结构结合起来,并通过一个有用的改进度量来评估它们的性能,因为锌电极的刚度和柔韧性允许它们作为适形承重组件使用。他们通过将锌空气电池安装在中型和微型玩具机器人上进行实验。
该团队用锌空气电池替换了原来的电池,这些电池在柔软和灵活的微型机器人中都起到了保护外壳的作用。他们能够将电池与柔软灵活的元件整合到微型生物形态机器人的身体中,包括毛毛虫、蝎子、蜘蛛和蚂蚁(图3)尽管在这些应用中存在着典型的与强变形和振动相关的机械挑战。
他们还使用了一个洋娃娃大小的机器人玩具进行评估。电压的稳定性、充放电极化曲线、功率密度和离子在不同弯曲角度下的导电性能表明,即使在应力弯曲条件下,电池功能和功率输出也不会降低,这是由于电解质膜的坚固和灵活(图4).
此外,通过逐段、尺寸和空间的体积分析来更换模型机器人的保护罩或补充原始电源(图5),他们得出的结论是,这种电池的总容量是目前独立锂离子电池的170到340倍。
另一个结论——坦率地说,对我来说似乎有点乐观——是他们的生物形态电池可以提供72倍的更大容量和更长的运行时间(是的,这是“时间”而不是“百分比”!)Kotov实验室生物医学工程的博士生Ahmet Emre说:“电池具有双重功能:储存电荷和保护机器人的‘器官’——复制了生物体内储存能量的脂肪组织的多功能。”
他们在电池材料、化学和制造方面的工作和测试,以及装配和测试这些生物形态电池的细节,在他们的论文中有详细的介绍。”机器人用生物形态结构电池”发表在科学的机器人.它有一个细节补充材料文件,也包括链接到多个视频包括这个有趣的人还有一幅显示电池被取出。这项研究是由国防部、国家科学基金会和空军科学研究办公室资助的。